01 / The Core DifferenceRTLS Is for Indoors, GPS Is for Outdoors
The most useful place to start with RTLS vs GPS is the environment each was designed for. RTLS is a family of indoor tracking technologies, built either around fixed anchors and short-range radio or around onboard sensors that calculate position locally. GPS, by contrast, is a single outdoor tracking technology built around satellites in Medium Earth Orbit (MEO), roughly 20,200 km above the surface. The GPS signal that works fine in an open yard rarely survives a steel roof or a multi-story concrete structure, and that physical limit is what creates the indoor problem RTLS exists to solve.
Use cases follow the physics. An outdoor fleet tracking a delivery truck across a state highway needs five-to-ten-meter accuracy at most, and a software feature called map matching does the rest, snapping the noisy GPS position to the nearest road on a digital map so the displayed location lands on the correct lane even when the raw fix is several meters off.
A torque tool engaging the right bolt at the right station on an assembly line, a forklift weaving around pedestrians in a warehouse, or an AGV docking with a pallet conveyor, none of those are satellite problems. They are anchor-based RTLS problems, or SLAM problems where the forklift or AGV carries its own LiDAR or vision sensors, and the accuracy bar runs from sub-meter to centimeter.
That accuracy bar is what separates the two in practice. Outdoor workflows rarely demand sub-meter resolution; the cost of the open environment is the price of imprecision, and where higher accuracy is required, it is added back through GNSS augmentation techniques described in the next section. Indoor workflows, by contrast, commonly demand centimeter-to-meter resolution because process integrity depends on knowing exactly which bay, lane, station, or rack contains the asset. RTLS and GPS are not in competition; they cover different environments with different accuracy needs, and most modern operations use both.
02 / GPSWhat GPS Actually Is
Let's define the term before any comparison. So what is GPS tracking system shorthand for: GPS is a US Department of Defense satellite constellation, currently operating at least twenty-four active satellites in Medium Earth Orbit (MEO), approximately 20,200 km above the surface, broadcasting timing signals a ground receiver triangulates into a fix. A consumer-grade GPS receiver, under open sky, gives roughly three to ten meters horizontally, slightly worse vertically. The official GPS.gov performance standard publishes the formal accuracy bounds the system commits to.
Three to ten meters is enough to drive a car down a highway. It is not enough to tell two adjacent yard slots apart, and GPS indoor accuracy collapses inside a building, where the signal is absent or degraded by metal roofs, concrete, and racking. That is where the RTLS vs GPS confusion begins.
The other source of confusion is terminology. In day-to-day speech, GPS has become a generic word for any satellite positioning. A modern receiver almost never uses GPS alone. It uses GNSS, the umbrella that covers GPS and three other constellations. That distinction matters, and is the subject of the next section.
03 / GNSS and RTKGNSS, RTK, and the Cost of Accuracy
GPS is one of several operational GNSS constellations. The others are Galileo (EU), GLONASS (Russia), and BeiDou (China). A modern multi-constellation receiver tracks several of these at once, which improves availability and accuracy. When a brochure says GPS tracker, the hardware is almost always GNSS. Any honest GPS tracker comparison should clarify which constellations the receiver actually supports.
Once that is clear, accuracy stops being a single number and becomes a scale. Standard GNSS, unaugmented, delivers three to ten meters. SBAS, the augmentation services (WAAS in North America, EGNOS in Europe), tightens accuracy to one to three meters. Differential GNSS using a local base gets to sub-meter. RTK, Real-Time Kinematic, uses a base station or network correction stream to reach one or two centimeters in real time. PPP, Precise Point Positioning, reaches comparable centimeter accuracy without a local base, though convergence takes longer.
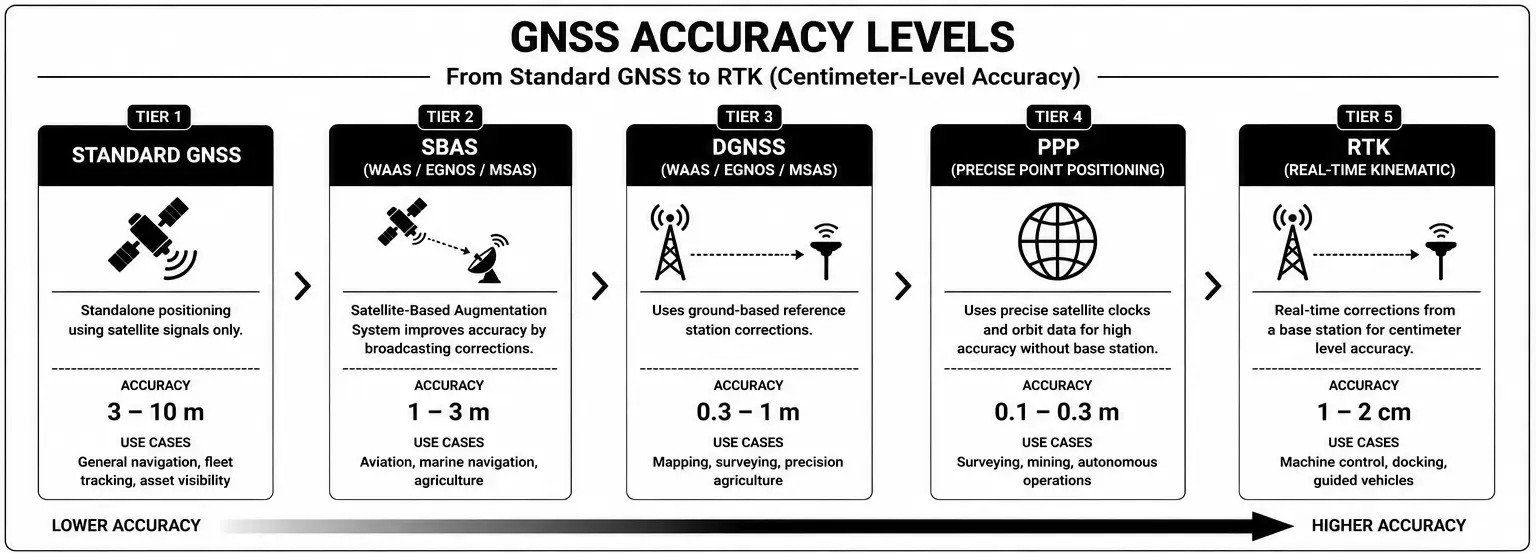
For an automotive yard with thousands of vehicles in numbered slots, three to ten meters is a guess. RTK is the workhorse. The NOAA CORS network publishes the corrections that make site-level RTK practical, and Galileo's free High Accuracy Service now offers PPP-level corrections from the satellites, changing the cost model for outdoor centimeter accuracy.
Accuracy carries a cost the spec sheets rarely show. RTK and PPP both require the receiver to listen on additional frequencies and run more demanding computations than a basic GNSS chip, so the tag draws meaningfully more power; in field deployments, the same tag battery that lasts years on basic GNSS can drop to months on continuous RTK. Buying centimeters costs milliwatts. The system design conversation, then, is about finding the right balance between accuracy and operating life for the use case actually being served, rather than reflexively chasing the highest accuracy number on the data sheet.
04 / RTLSRTLS Is a Family of Technologies, Not a Single Standard
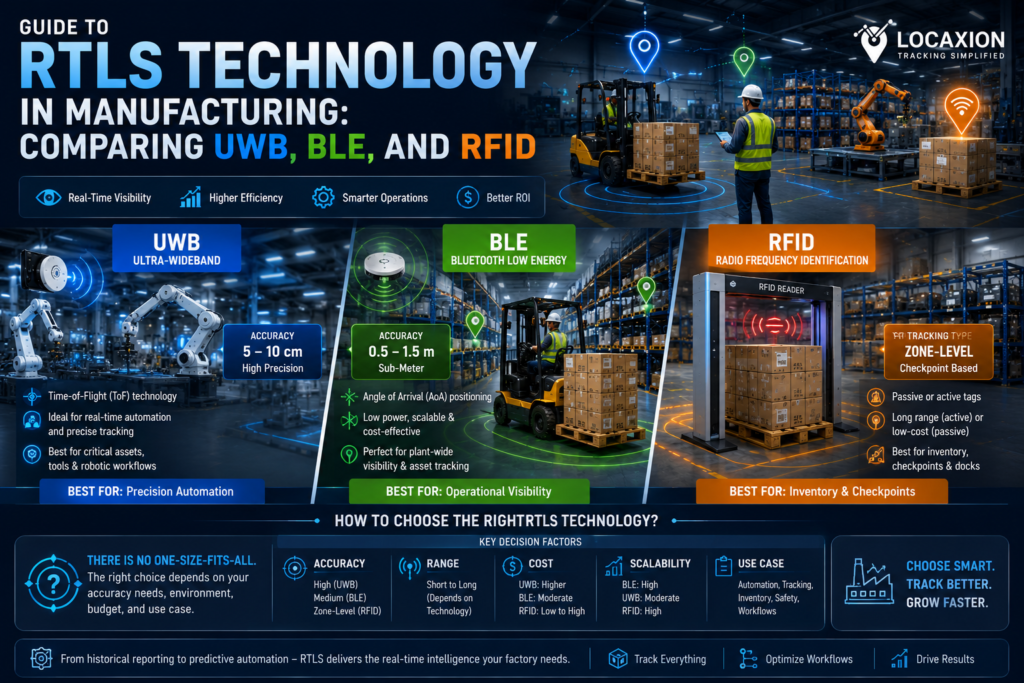
Unlike GPS, RTLS does not have a single clearly defined standard or a single underlying technology. It is a category label that covers a family of indoor positioning technologies, each with its own physics and trade-offs: UWB (ultra-wideband, governed at the radio layer by IEEE 802.15.4z), BLE AoA and BLE RSSI (built on the Bluetooth Core Specification maintained by the Bluetooth SIG), Wi-Fi positioning (governed by the IEEE 802.11 family), RFID, Vision with AI tracking, and SLAM running onboard mobile robots and forklifts. The indoor positioning techniques involved are different in kind from satellite trilateration, which is why the RTLS vs GPS contrast starts here. We compared these technologies in detail, with accuracy bands and best-fit use cases for each, in our best RTLS systems guide.
Architecturally, the contrast with GPS is sharp. GPS works because satellites broadcast from Medium Earth Orbit and the receiver listens. Anchor-based RTLS works because fixed anchors are bolted to a known site coordinate frame, and the tag or anchor calculates time-of-flight, angle of arrival, or signal strength against those reference points. SLAM works on a different principle again, with sensors on the vehicle itself building a map and locating the vehicle inside it. In all three cases the infrastructure lives on the site rather than in orbit, which is what flips the indoor accuracy story in the first place: no satellite signal survives a steel roof, but a network of anchors or an onboard SLAM sensor can deliver decimeter to centimeter truth inside it.
The trade-off is also sharp. Anchor-based RTLS requires anchor density, power and network at each anchor, and a site calibration process; it does not scale to a large outdoor yard, because the anchor count for fifty acres of asphalt would be uneconomic. SLAM avoids the anchor problem but requires up-front mapping of the environment and works best indoors where the visual or LiDAR features it relies on remain stable. GPS, on the other hand, requires nothing on the site but cannot reach inside a building. Different problems, different environments, and exactly the reason the two are complements rather than competitors.
05 / Combining the TwoCombining Outdoor and Indoor in One Digital Twin
Most operations end up deploying one outdoor tracking technology and one or more indoor tracking technologies, then combining them in a Digital Twin. The outdoor option set is wider than GPS alone. Beyond GNSS and RTK, large outdoor footprints frequently use LoRa, NB-IoT, and 4G or 5G cellular both for positioning (each can provide a coarse fix on its own or refine a GNSS fix through hybrid trilateration) and for data backhaul. In practice the backhaul layer is always present because the tags need to report somewhere, and many deployments pair GNSS or RTK for position with LoRa, NB-IoT, or cellular for the radio link itself; treating the two as separate choices is what makes the architecture coherent.
The indoor option set is wider still. UWB delivers centimeter accuracy where the workflow requires it. BLE AoA reaches one to three meters for general asset visibility. BLE RSSI is room-level at very low cost. Wi-Fi can use the existing WLAN with extra beacons where coverage gaps appear. RFID handles choke-point reads. Vision and AI cameras work without tags. SLAM is the right answer when the asset already carries onboard sensors. The choice is set by the use case and the operational reality, not by a corporate standardization on a single radio.
Our role as a vendor-agnostic integrator is to select the right combination, fuse the result into one Digital Twin, and integrate that Twin into the production systems the operations team already runs, MES, WMS, EHR, ERP, BI, so the tracking layer is not yet another silo. Whether the outdoor side is plain GNSS, RTK, or RTK over a LoRa link, and whether the indoor side is UWB on its own or a hybrid of three indoor technologies, the Digital Twin holds the unified picture and the operator sees one asset moving across the site, regardless of which radio happens to be reporting at any given moment.
06 / Real-World ExamplesCombining Indoor and Outdoor in Practice
Two representative real-world examples illustrate how outdoor and indoor positioning can be combined under one Digital Twin on a working site.
Automotive OEM. UWB tags follow torque tools and critical work-in-process on the final assembly line at centimeter accuracy, verifying that the correct torque was applied at the correct bolt at the correct moment in the build sequence and feeding the build genealogy record for that VIN. Subsequent line steps such as paint inspection, glazing, and trim verification continue with UWB and AI cameras for similar process-bound visibility. The NHTSA recall framework is one reason the build genealogy needs this kind of audit trail. Once the finished vehicle leaves the line, the layer changes to RTK in the yard, which locates the vehicle within one or two centimeters in a specific numbered slot. With a yard holding thousands of finished vehicles, the difference between “somewhere in row F” and “slot F-204” is the difference between a twenty-minute search and one that takes under two minutes, and outbound logistics queues against the slot identifier with confidence.
Inbound and outbound logistics. A trailer arriving to collect goods from a warehouse or distribution center carries a GPS tracker. The yard management system receives the trailer’s ETA and assigns a dock door, then passes both pieces of information to the WMS, which sends a real-time task to the closest available operator to begin staging the load at the assigned door before the trailer arrives. When the trailer reaches the dock, indoor RTLS combined with automated QR or barcode scanning takes over the load confirmation, and GS1 EPCIS defines how the scan events are exchanged across carriers and customers, making the inbound and outbound trail auditable.
In both cases the Digital Twin handles the handoff between outdoor and indoor positioning, and the user sees one continuous track on one map. The trailer’s GPS feed and the warehouse RTLS feed reconcile into the same view.
If you are mapping outdoor and indoor positioning for a real site and want a second opinion on the right technology mix, talk to us. We have deployed across every use case in this guide.
Schedule a technical review →07 / The Decision FrameworkWhen to Use Which, When to Combine Both
The framework is shorter than the question suggests. Three rules of RTLS vs GPS accuracy cover almost every site we have walked.
Rule one. If the asset only moves outdoors and three-to-ten-meter accuracy is enough (over-the-road fleet, coarse yard tracking, parking count), standard GNSS alone is correct. Do not over-buy.
Rule two. If the asset moves outdoors and must be located within a specific slot, dock lane, or guided-vehicle path, GNSS plus RTK. The increment over standard GNSS is a base station or a correction subscription, plus a multi-constellation receiver. Both have dropped substantially in the past three years.
Rule three. If the asset crosses indoor and outdoor boundaries in the same shift, which specifically applies to industries such as automotive OEMs or warehouse-to-yard operations as an example, the answer is GNSS plus RTK when the accuracy demands it, plus at least one indoor RTLS technology, fused under one Digital Twin. The choice of indoor technology is the next conversation; the architectural decision is the layering itself.
08 / FAQFrequently Asked Questions
GPS is a satellite-based positioning service that works outdoors with roughly three to ten meter accuracy in its standard form. RTLS is a category of indoor positioning hardware, including UWB, BLE, RFID, Wi-Fi, Vision, and SLAM, deployed where satellite signals do not reach. GPS uses orbiting satellites; RTLS uses fixed anchors on a site, or onboard vehicle sensors. They are not competitors. On a real manufacturing footprint, they are complements layered together.
Not reliably. GPS signals are weak by the time they reach the surface and are blocked or distorted by metal roofs, concrete, racking, and machinery. Some assisted-GPS phones approximate indoor position to thirty or fifty meters, which is not useful for plant operations. The terms indoor GPS or GPS for indoor tracking are marketing labels; the real solution is an RTLS under one Digital Twin.
GPS is the US satellite constellation. GNSS, Global Navigation Satellite System, is the umbrella term covering GPS, Galileo (Europe), GLONASS (Russia), and BeiDou (China). A modern receiver tracks several constellations at once, which improves availability and accuracy. When people say GPS they usually mean GNSS. The distinction matters because multi-constellation receivers behave very differently from GPS-only ones.
RTK, Real-Time Kinematic, is a correction technique that lifts GNSS accuracy from several meters to one or two centimeters by using a fixed base station or a network correction service. You need it when an outdoor asset must be located within a specific stall, dock door, or numbered parking slot, or when guided vehicles operate outdoors. For coarse yard tracking, standard GNSS is enough.
Through a synthesis layer, typically a vendor-agnostic Digital Twin, that ingests events from every positioning tier on the site and reconciles them into one coordinate frame. The Twin handles the handoff when a tagged asset crosses from a GNSS-tracked yard into a UWB-tracked plant floor, so the operations team sees one continuous track on one map. The hardware varies by zone; the picture above does not.