Indoor Positioning Techniques: Finding Your Way Indoors
Indoor positioning is the core function of RTLS systems. Several techniques are employed to calculate the precise location of tagged assets or people within a defined area. Let's explore some of the most common methods:
Trilateration
- Principle: Determines the location of a point by measuring distances to three known points.
- Process: Anchors transmit signals, and the tag measures the time it takes for the signals to arrive. By calculating the distances to three anchors, the tag's position can be determined.
- Advantages: Accurate and reliable in ideal conditions.
- Disadvantages: Can be affected by multipath interference and non-line-of-sight conditions.
Multilateration
- Principle: Similar to trilateration, but uses more than three anchor points for improved accuracy.
- Process: By involving additional anchors, the system can better filter out noise and errors, resulting in more precise location data.
- Advantages: Higher accuracy compared to trilateration.
- Disadvantages: Requires a denser network of anchors, increasing costs.
Fingerprinting
- Principle: Creates a radio map of the environment by collecting signal strength data from multiple locations.
- Process: During a calibration phase, signal strength measurements are taken at various points within the area. This data is used to create a database of "fingerprints." When a tag's signal is received, its location is estimated by comparing the signal strength to the stored fingerprints.
- Advantages: Can be used in complex environments with obstacles.
- Disadvantages: Requires extensive calibration and may be less accurate than trilateration or multilateration.
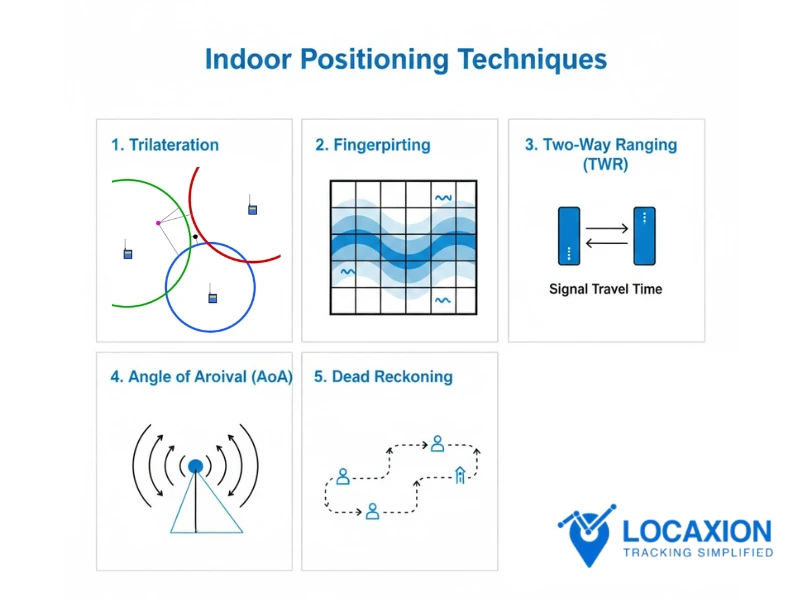
Dead Reckoning
- Principle: Estimates the current position based on previous positions and movement data.
- Process: By tracking changes in direction and speed, the system can calculate the new position relative to the starting point.
- Advantages: Can be used in conjunction with other techniques to improve accuracy and reduce reliance on GPS signals.
- Disadvantages: Accumulated errors over time can lead to decreased accuracy.
Two-Way Ranging (TWR)
- Principle: Uses two-way communication between devices to sense the distance between them.
- Process: Devices start ranging with each other when in close proximity, determining distance based on the time it takes for a signal to travel between them.
- Advantages: Enables location-aware communication without additional infrastructure.
- Disadvantages: Limited to close-proximity interactions.
Angle of Arrival (AoA)
- Principle: Uses the angle of incoming signals to determine location.
- Process: A mobile asset transmits to a fixed RTLS sensor with a multi-antenna array. The phase shift of the received signal is measured to determine the angle of the transmitting device.
- Advantages: High accuracy with fewer reference points needed compared to multilateration.
- Disadvantages: Complex setup and requires advanced hardware.
Received Signal Strength Indicator (RSSI)
- Principle: Uses signal strength to estimate location.
- Process: Fixed RTLS sensors detect the signal strength of a transmitting device. The location engine analyzes the signal strength data using multilateration algorithms to estimate the device’s location.
- Advantages: Low-cost and easy to implement.
- Disadvantages: Susceptible to signal attenuation, absorption, reflection, and interference, leading to lower accuracy.
Hybrid Approaches
In many cases, a combination of these techniques is used to achieve optimal performance. For example, dead reckoning can be used to estimate position between GPS fixes, and fingerprinting can be employed in areas with poor GPS reception.
By understanding these indoor positioning techniques, you can select the most appropriate method for your RTLS application based on factors such as accuracy requirements, environmental conditions, and cost constraints.